Overview
The design of spherical mechanisms is an inherently spatial problem. Spherical mechanisms are pin-jointed spatial linkages which are used to move an object along a three-dimensional path in space. A spherical mechanism differs from a planar mechanism in the orientation of its axes of revolution. In a planar mechanism all the axes of the pin joints are parallel. In a spherical mechanism, however, all of the axes of revolution intersect at a single point. This constrains each of the pin joints to lie on concentric spheres about this point. The understanding and insight gained through the immersion and interaction inherent in Virtual Environment Design, lend significant enhancements to the synthesis of spherical mechanisms.
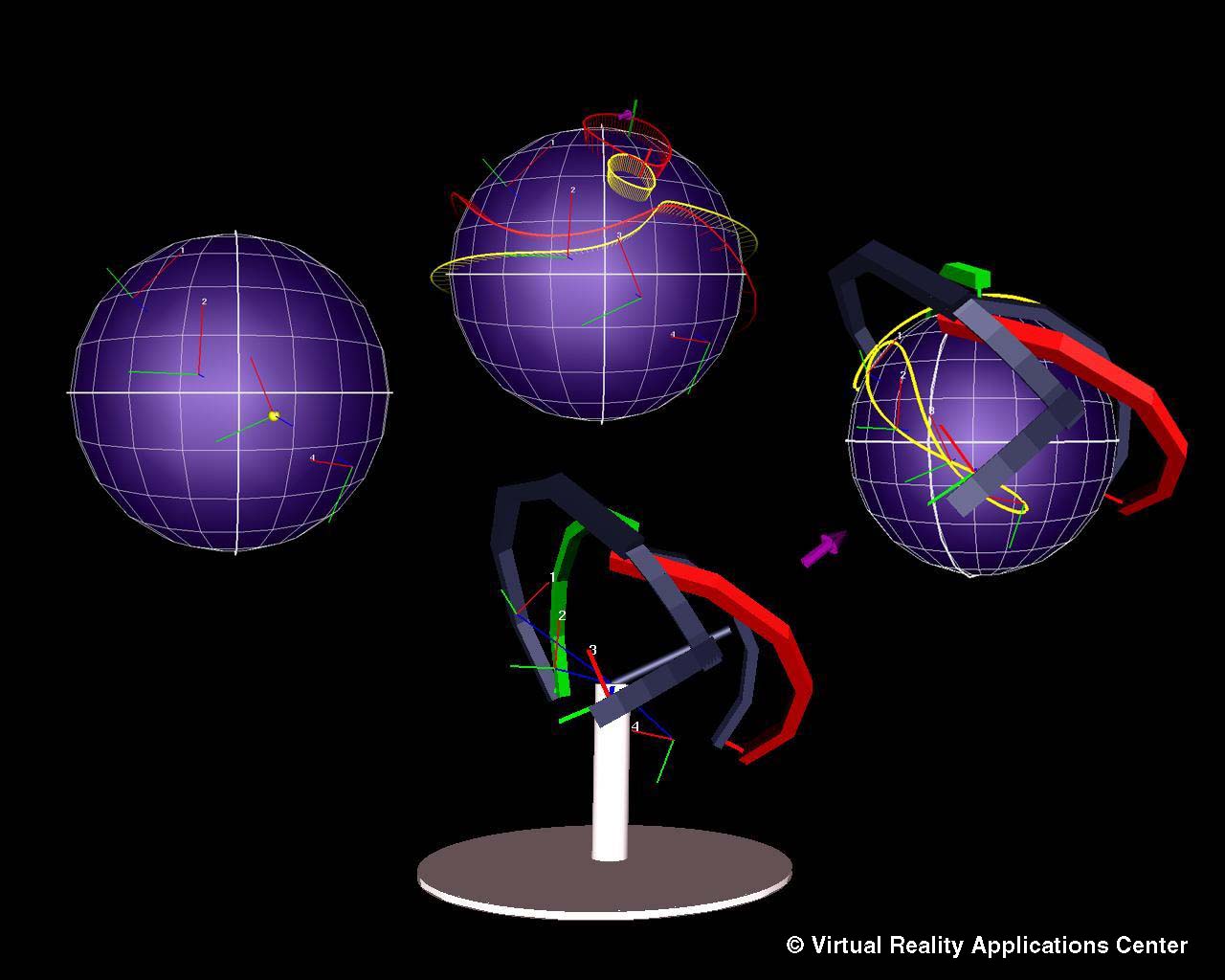
During synthesis, markers are initially placed on a conceptual sphere indicating the desired position and orientation of the coupler link in each of the four positions. Next, the fixed pivots of the driving and driven links are chosen from the circle and center point cones. Finally, a mechanism and coupler curve are generated.
This application is based on a spherical linkage synthesis software package called SPHINX from the University of California, Irvine and a virtual reality toolkit called WorldToolKit.
Additional Media
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Personnel
- Judy M. Vance, Principal Investigator, jmvance@iastate.edu
- Juliet Kraal, Graduate Research Assistant
Funding
- Virtual Reality Applications Center
- Institute for Physical Research and Technology
For more information, see: A Virtual Reality Environment for Spherical Mechanism Design