Iowa State University – Massachusetts Institute of Technology

Overview
The purpose of this research is to establish an engineering framework for design of compliant mechanisms based on constraint-based compliant mechanism design theory and virtual reality. Compliant mechanisms, as opposed to rigid link mechanisms, achieve motion guidance via the compliance and deformation of the mechanism’s members. The successful design of compliant mechanisms requires an understanding of solid mechanics (deformation, stress, strain, etc.) and mechanism kinematics (properties of motion). As a result, only a fairly narrow, experienced group of engineers are successful in designing these mechanisms. In this work, virtual reality will be used to provide a design interface that supports a more natural way to design and synthesize compliant mechanisms which will result in creative, efficient and thorough design of novel new mechanisms.
Constraint-based compliant mechanism design theory is a powerful and rational design process where a desired motion path is first described, then decomposed into combinations of lines, arc, and rotations which can be achieved through combining a series of compliant mechanism components and sub-components. Finally optimization of the size-shape of the compliant elements within the design is performed to achieve the final mechanism. Compliant mechanisms are key components of micro-electro-mechanical-systems (MEMS). Successful design of compliant mechanisms is crucial to further development of MEMS and other miniature products. The traditional human-computer interfaces (HCI) of a monitor, keyboard and mouse are well suited for the design of conventional planar rigid-link mechanisms where rigid body motion is familiar to all designers. However, the deformation of flexible links in compliant mechanisms results in motion that is rarely intuitive and often three-dimensional in nature. Virtual reality, combined with constraint-based design methods, will provide a natural three-dimensional design environment where engineers can rapidly explore the design space to generate constraint-based design concepts (topology), evaluate the concepts and perform detailed design.
Currently, significant experience is required to design suitable compliant mechanisms because of the non-intuitive motion of these types of mechanisms. The result is that most engineers resort to designing more traditional, rigid-body linkages to provide motion. This research will culminate in a design framework that will allow a broader group of engineers to design complex compliant mechanisms, giving them new options to draw upon when searching for design solutions to critical problems. This will result in novel mechanism solutions for manufacturing and product design which have fewer movable joints, are more robust, and are easily scaled to meet the needs of micro-products.
Media
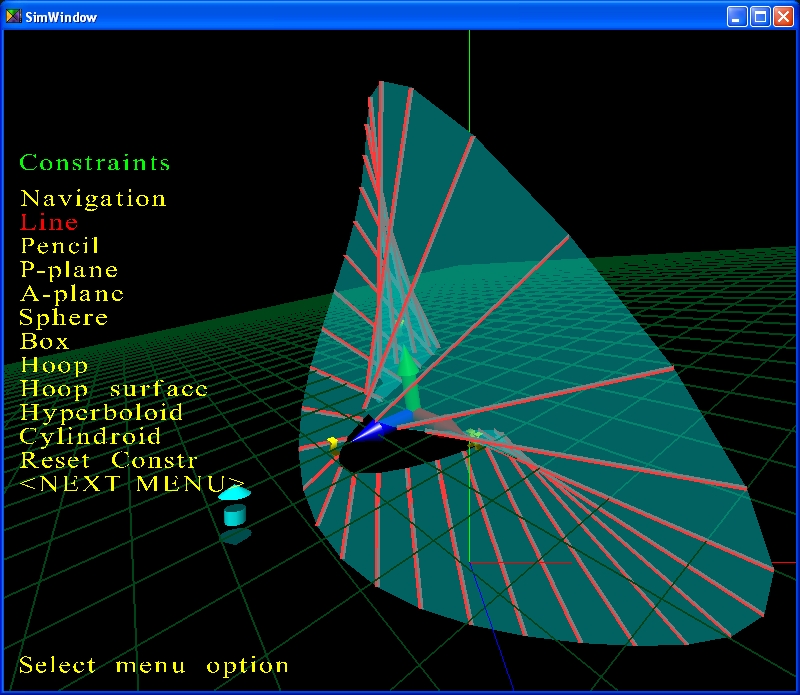
- Cylindroid constraint space JPEG, 313KB
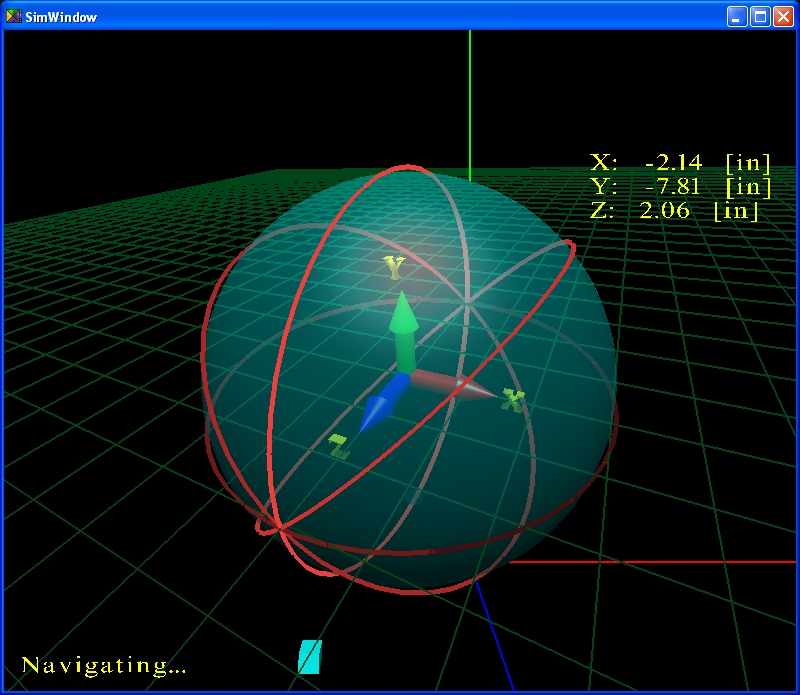
- Hoop surface freedom space JPEG, 281KB
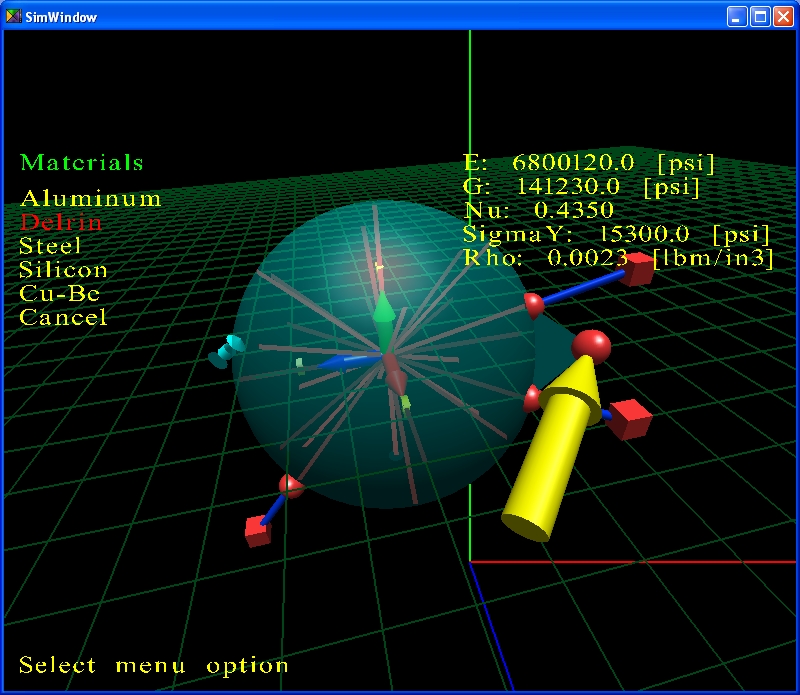
- Simple compliant system JPEG, 381KB
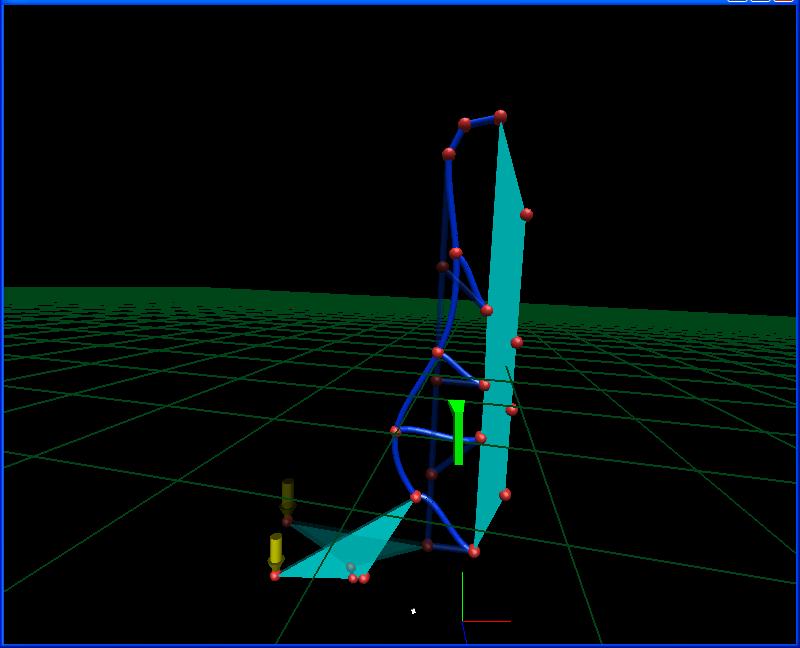
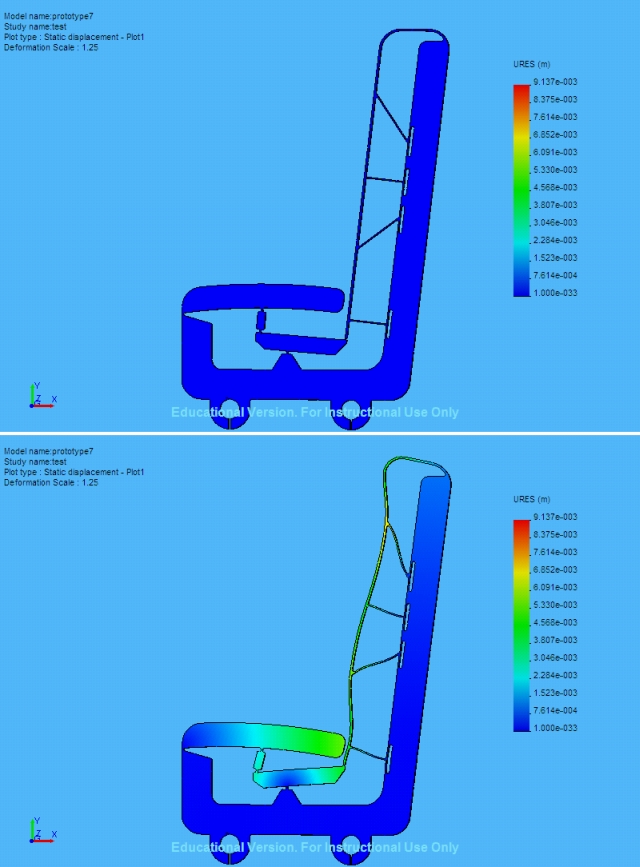
- Compliant lumber support:
- VR design JPEG, 44KB
- FEA analysis JPEG, 275KB
- Physical prototype JPEG, 200KB
- Video: Constraint definition WMV, 2.8MB WMV, 21MB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Personnel
- Dr. Judy M. Vance, Professor and Chair, Iowa State University
- Dr. Martin L. Culpepper, Associate Professor, Massachusetts Institute of Technology
- Denis Dorozhkin – Graduate Research Assistant, Iowa State University
- Utkarsh Seth – Graduate Research Assistant, Iowa State University
- Jonathan Hopkins – Graduate Research Assistant, Massachusetts Institute of Technology
Funding
- National Science Foundation – Grant Number: 0457041